

Knowledge Base & Support
TOPICS
Adding Survey Coordinates
The following article demonstrates working with artificial targets with known survey or external coordinates and adding them to a Vercator cloud project.
It also contains definitions for the accuracy report.
Survey Coordinates
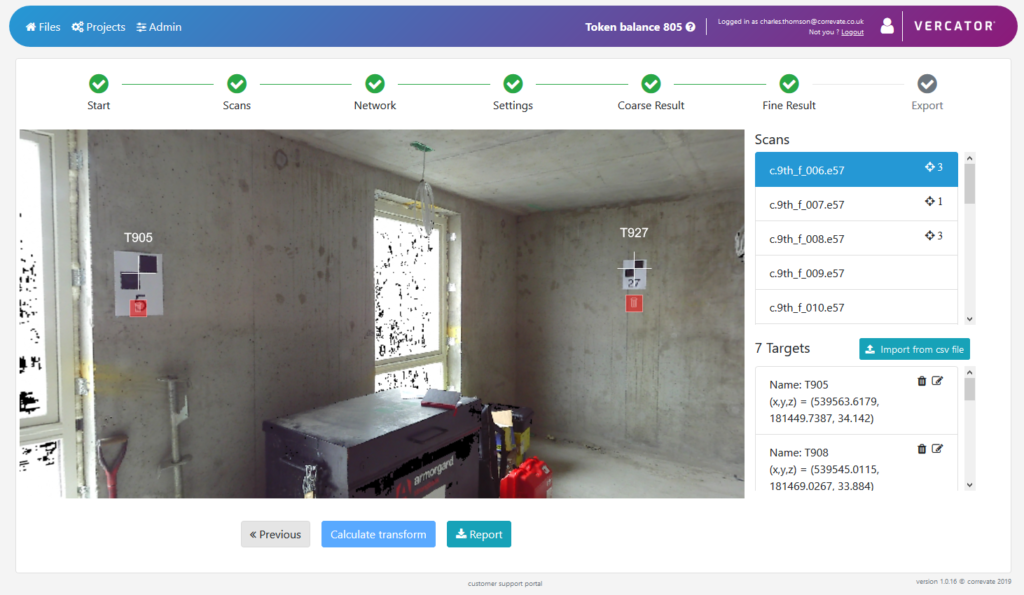
Once the fine registration has been computed then the option to add survey coordinates is available at the bottom of the page.

Once the survey coordinates tool is entered the view is divided into three main areas:
- The left half is the scan view for picking targets which have external coordinates (currently features such as spheres are not supported)
- On the upper right is the list of scans with a count of the targets picked in each
- On the lower right is the list of coordinated targets, which can be manually added or imported from a csv file
Add targets
Target coordinates can be added either through the import of a csv file in the form: point name, x, y, z or manually as they are picked in the scans.
Targets not picked in the scans are highlighted red in the list.
To pick a target in the scan scene, right click in the scene close to the target centre and choose either to create a new target or pick one already existing by name.
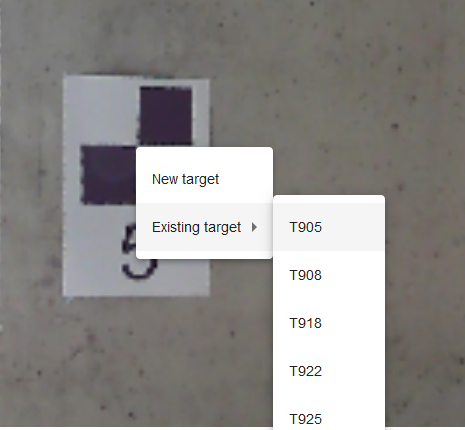
If New target is picked then a dialog pop-up appears asking for the target information as in the below:

The various fields can be filled in. The last option of Auto checkerborard centre finder allows for the centre of black & white targets to be precisely detected when the Calculate Transform step is performed.
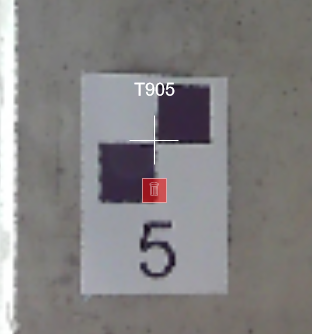
Remove Targets
Targets can be removed from a scan scene by pressing the red bin icon under the target marker:
Calculate transform
Once all the targets have been chosen, then the adjustment for the transformation can be calculated by selecting Calculate transform. The processing will then start in the background.
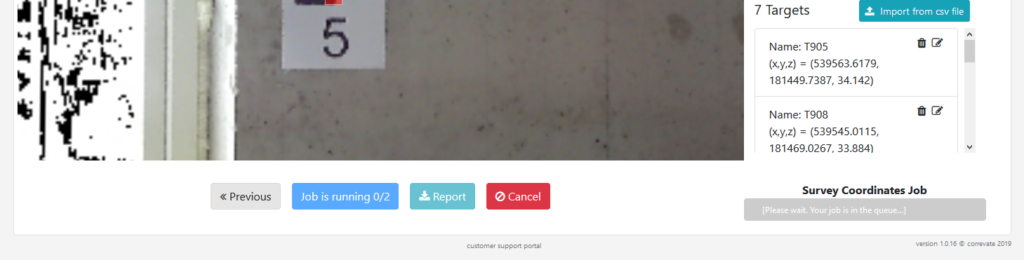 Once the processing has finished the statistical report can be downloaded and read in any text editor. Notepad++ is recommended as the formatting is preserved.
Once the processing has finished the statistical report can be downloaded and read in any text editor. Notepad++ is recommended as the formatting is preserved.
Survey Coordinate Report Definitions
All error values are given with scientific notation, for example 7.89123e-3 is the same as 0.00789123 (or 7.89 mm if the units are metres).
Survey Coordinate Location
An external coordinate that is manually entered and measured independently from LIDAR scans. For example coordinates measured using a total station.
Identified Target Location (Identified Coordinate)
An in-scan coordinate that corresponds to a survey coordinate, i.e. a location in a scan point cloud that has been marked as being the location of the survey coordinate.
This location is currently an actual measured point from the scan point cloud, and chosen as the point which is closest to the position chosen in the scan bubble view. That means that the accuracy will depend on the point density in the region where the target is identified.
Survey Transformation
Survey transformation is a transformation that when applied to all scans, optimises the alignment between all entered target survey coordinate locations and the corresponding identified target locations.
Target Mean Position
The mean position of each identified target location in all scans, for a given target.
This location is calculated after applying the survey transformation.
RMS survey-position error
Root-mean-squared error between a target’s survey coordinate and all the identified target locations in scans where the target has been identified.
RMS Position spread
RMS error between the mean identified location of a target and all the locations in each scan where the target is identified.
(This can be used as an error measure of local registration accuracy, provided it is possible to accurately identify the target in each scan)
Survey Position Error
A distance between a target’s survey coordinate location and identified location. This is calculated for each scan where a given target has been identified.
This distance is calculated after the survey transformation has been applied to the scan. A large error indicates a mismatch between the overall entered survey coordinates and identified coordinates.
Scan to Target Distance
The distance between the identified target location and the scanner location in a scan.