

Knowledge Base & Support
TOPICS
Ground (UAV surface filtering) Classification Model
Description
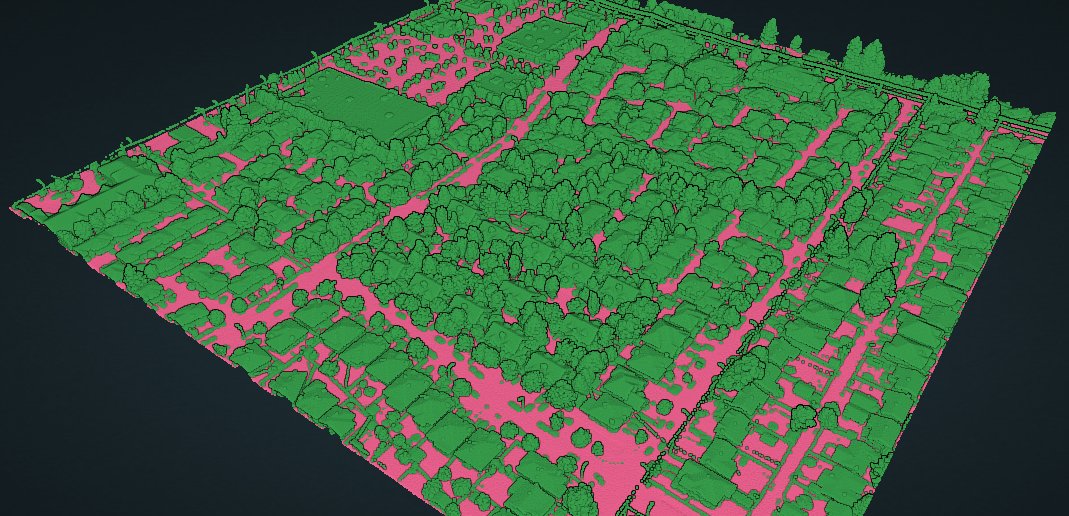
This is a classification model that separates the ground plane from the remaining data and applies filtering on flat surfaces to better average the result from UAV data, placing points filtered out into the noise class.
Low ground and high ground together represent the ground plane detected. Low ground represents the lowest points detected as ground, similar to the representation from a cloth-draping algorithm.
Ground detection is often a core requirement for DEM generation and other bare earth terrain management and mapping purposes.
Optimal Scene
Large scale aerial coverage of regions
Optimal Scanner Type
UAV laser scan point cloud data
Optimal Average Point Spacing
25 mm or closer
Class List
| Class Name | LAS/Z code |
|---|---|
| unclassified | 1 |
| low ground | 2 |
| high ground | 65 |
| non ground | 64 |
| noise | 66 |