

Knowledge Base & Support
TOPICS
Registration Settings
The settings for a registration project in Vercator Cloud control how the data is interpreted by the service.
Below is the interface of the Settings for a registration project. It contains a few of the parameters that can be changed depending on the nature of the data being processed. Some useful defaults are provided with the preset buttons but changes may be needed depending on data and environment captured.
All values are in the units of the scans provided. The populated default numbers assume metres currently. The ? symbols are tooltips that provide brief descriptions of the functions. A fuller explanation is below.
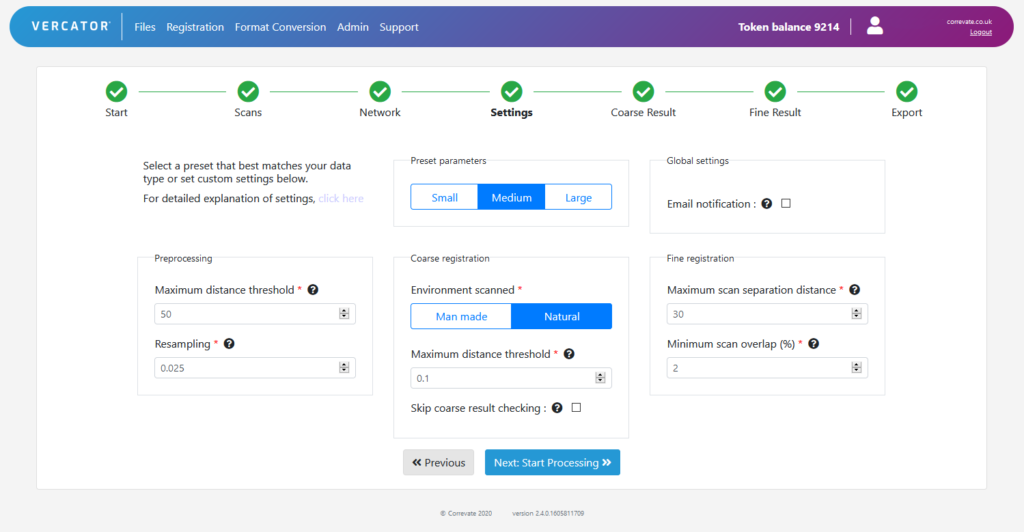
Preprocessing
Max Distance Threshold: the maximum point distance from the scanner to use in the registration. Longer range scans may require a larger value here to take into account more common features at range.
Resampling: the minimum distance between points; a smaller figure increases processing time. This evens out the spacing of points in the scans to avoid bias from the dense amount of points close to the scanner.
Coarse Registration
Environment Scanned: This setting is used to select the appropriate processing algorithm for the data provided. If it is mainly built environment data where a lot of hard edges are found then Man Made is appropriate, however if the scene is more natural with vertical features such as found in mines or tunnels then Natural often performs better.
Maximum Distance: the maximum distance to search for corresponding points between scans for goodness-of-fit statistics calculations.
Skip coarse result checking: whether or not to send the result of the Coarse Registration straight to the Fine Registration for processing without review by the user.
Fine Registration
Maximum Scan Separation Distance: maximum distance between any two scan positions for them to be considered for further processing to each other in a cluster or bundle. If this value is too small the registration may be of lower quality as fewer scans are clustered together to refine the solution.
Minimum Scan Overlap (%): minimum overlap between scans to consider calculating fine registration group solution with. This setting can affect scans with long range points where a tiny fraction is overlapping a series of much denser scans clustered nearer to a specific scene. A larger percentage may be less precise at distance but computes faster, whereas a smaller percentage may be more precise at distance but more sensitive to noise and compute slower.
Global Settings
Email notification: whether or not to have the Vercator service email you when it completes each processing stage.