

Knowledge Base & Support
TOPICS
Coarse Registration
The coarse registration step presents the result of the initial coarse registration processing. This result doesn’t need to be perfect but needs to be close enough (1-2cm) for the fine registration to finish successfully.
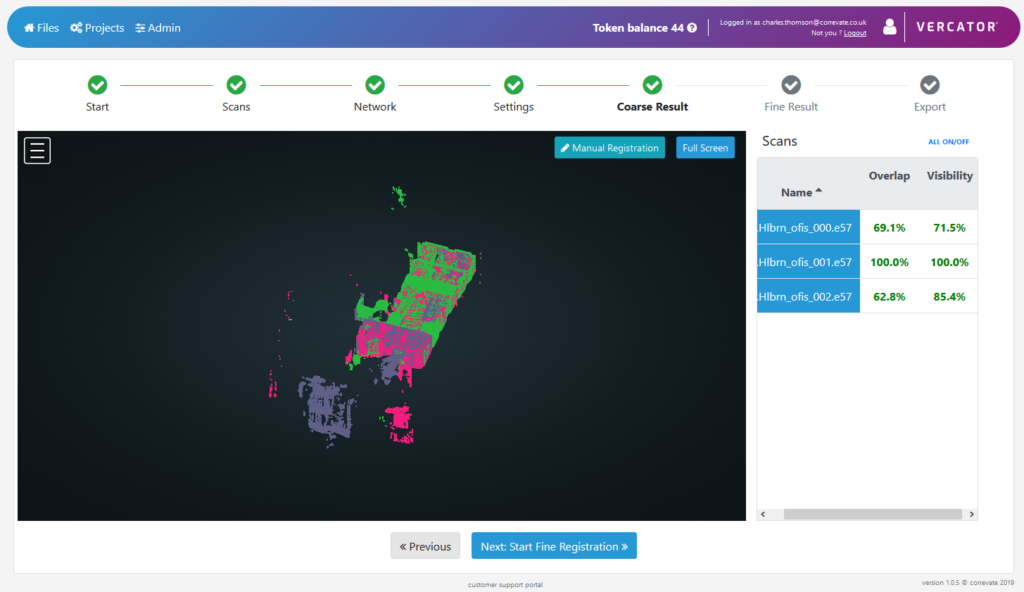
The coarse registration page has two parts to enable checking the result:
- the 3D view of the data on the left
- the scans and statistics on the right
The 3D view can be read about in more detail here. Clicking on the scan names turns them on or off in the 3D view.
The coarse registration statistics are represented as Overlap and Visibility. They can be sorted by clicking on the header title.
These are both calculated pairwise in the network of scans defined at the start. Therefore the home scan has 100% in both values as it is matched to itself. These values can be useful as a guide to spotting errors where the registration may have failed, indicated by low percentages.
- Overlap is the percentage of points in the named scan that are common to its parent within a search tolerance. Higher is generally better.
- Visibility is the percentage of points in the named scan that are ‘visible’ or not occluded from the scan position in its parent (higher indicates more common points of intersection). This can be useful in interior scans especially because an incorrect alignment could have, for example, blocking walls that should not exist. In exterior scans this can sometimes be less reliable as there can be fewer obstructions to viewing large amounts of data from each position even when the orientations are wrong.
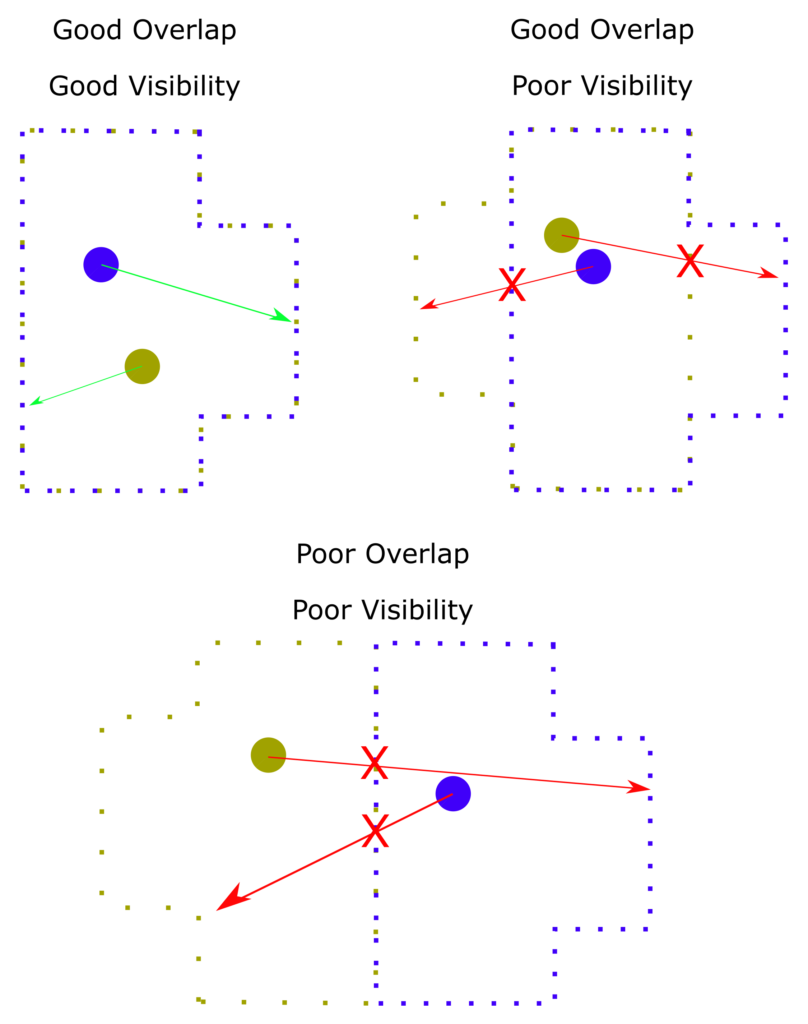
Arrows in diagram above shows visibility assessment