

Knowledge Base & Support
TOPICS
Fine Registration & Report
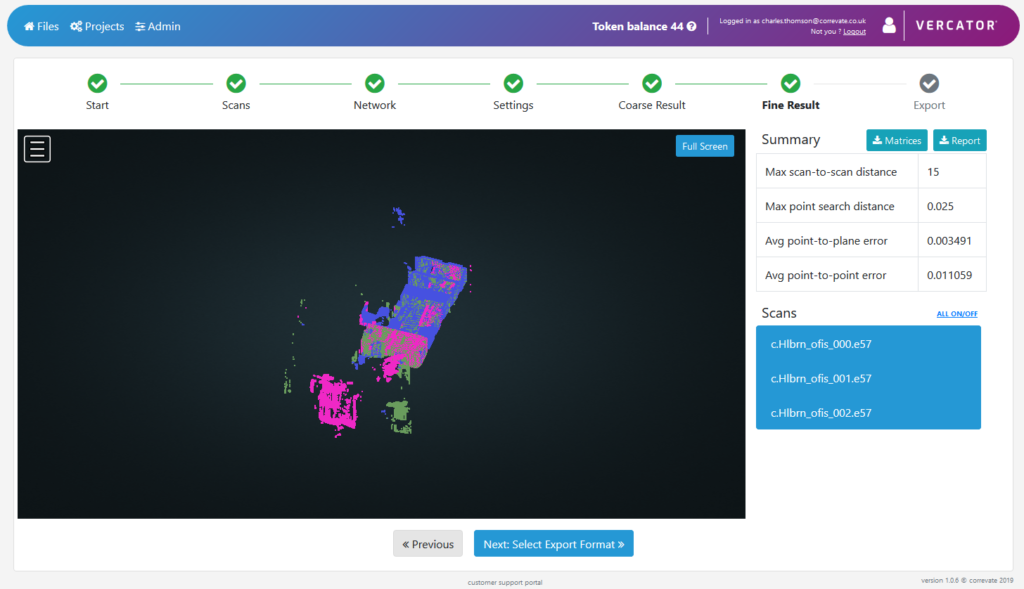
The fine registration page provides the final view of the registered data, including statistics about the fit as well as the final matrices.
- at each scan position, finding scans that are up to the maximum scan-to-scan distance away and within the minimum acceptable overlap (default 2%)
- adjusting this neighbourhood of scans to minimise errors.
The fine registration page has two parts to enable checking the result:
- the 3D view of the data on the left
- the scans and statistics on the right
The 3D view can be read about in more detail here. Clicking on the scan names turns them on or off in the 3D view.
Some summary statistics are shown on the right, along with links to download the final registered matrices and the full registration report.
The final point-to-point error is generally larger than the point-to-plane error due to the subsampling of the original data. Therfore the point-to-plane error is usually a better measure of the accuracy of the full resolution data.
Matrices
The matrices button allows you to download a csv file of the absolute transformation matrices in 4×4 format in row order, for each scan. These can be used as required in third party software to transform the original scans to their registered positions.
A 4×4 transformation matrix is divided into rotations (in blue), translations (in green) and the scale (in red).
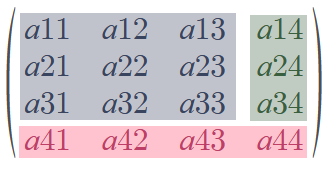
The csv is ordered as follows per line:
scan_name, a11, a12, a13, a14, a21, a22, a23, a24, a31, a32, a33, a34, a41, a42, a43, a44
Registration Report
The registration report contains a text file report of the final accuracy of the registration between all of the scans assessed.
The elements contained within the report are outlined below.
Term Definitions
Maximum scan-to-scan distance
The maximum distance between scans to form clusters in the global ICP to adjust scans locally; chosen by the user in settings
Maximum point search distance
The maximum distance to search from the target to the reference point cloud for a match; chosen by the user in settings
Child Scan
The subject scan
Parent Scan
The fixed reference scan
Mean Point-to-Plane Error
The average (mean) rms error calculated from each point in the child to the best fit plane in the parent, limited by the search threshold. This value can be more accurate for the underlying data as it is affected less by subsampling than point-to-point.
Mean Point-to-Point Error
The average (mean) rms error calculated from each point in the child to the closest point in the parent, limited by the search threshold. This value will be less accurate for the underlying data as it is affected more by subsampling than point-to-plane.
Scan-to-Scan distance
The distance between scan positions
Overlap fraction
The fraction of the child that is matched in the parent, based on the search threshold
RMS point-to-plane distance
The root mean square error calculated from each point in the child to the best fit plane in the parent, limited by the search threshold. This value can be more accurate for the underlying data as it is affected less by subsampling than point-to-point.
RMS point-to-point distance
The root mean square error calculated from each point in the child to the closest point in the parent, limited by the search threshold. This value will be less accurate for the underlying data as it is affected more by subsampling than point-to-plane.
Number of Overlapping Points
The number of points in the child that overlap with the parent with overlap defined by the maximum search distance.